
Earth and Atmospheric Sciences
In physics, elasticity is the “hardware” of a system—the material’s ability to snap back—while simple harmonic motion (SHM) is the “software”—the specific way that system moves over time.
1. What is Elasticity?
Elasticity is the property of a material that allows it to return to its original shape and size after being deformed by an external force.1
When you stretch a rubber band or compress a metal spring, the atoms inside are pulled away from their stable positions. The “restoring force” that tries to bring them back is the essence of elasticity.2
- Stress: The internal force per unit area (the “pressure” the material feels).3
- Strain: The ratio of change in length to the original length (how much it deformed).4
- Hooke’s Law: For many materials, as long as you don’t stretch them too far (the “elastic limit”), the force (F) required to stretch them is directly proportional to the distance (x) they are stretched: F = kx (Where k is the spring constant, representing the stiffness of the material.)
2. The Relationship to Simple Harmonic Motion (SHM)
Simple Harmonic Motion is a specific type of periodic (repeating) motion.8 It is the direct result of a linear elastic restoring force.
The Mechanism
For an object to undergo SHM, it must satisfy one condition: it needs a restoring force that is directly proportional to its displacement from equilibrium and acts in the opposite direction.9
Frestoring = -kx
Because elasticity (via Hooke’s Law) provides exactly this type of force, elastic systems are the most common examples of SHM.
The “Energy Swap”
In an elastic system like a mass on a spring, SHM is a continuous exchange between two types of energy:10
- Elastic Potential Energy: Stored when the material is deformed (11 U = 1/2kx2).12
- Kinetic Energy: The energy of motion as the object rushes back toward the center (13K = 1/2mv2).14
Key Connection Points
- Stiffness (15k): The more elastic/stiff a material is (higher 16k), the faster it will vibrate.17 This is why a tight guitar string (higher tension/stiffness) has a higher frequency than a loose one.
- Period of Oscillation (T): In an elastic SHM system, the time it takes for one full cycle is determined by the mass (m) and the elasticity (k): T = 2πsqrt(m/k)
Summary Table
| Feature | Elasticity | Simple Harmonic Motion (SHM) |
| Definition | A material property (ability to return to shape). | A type of motion (back-and-forth oscillation). |
| Requirement | Interatomic forces acting like tiny springs. | A restoring force proportional to displacement. |
| Role in the System | Provides the force (F = -kx). | Describes the position over time (x(t) = Acos(ωt)). |
Hooke’s Law and Simple Harmonic Motion
This video provides a visual demonstration of how Hooke’s Law leads to the sinusoidal movement seen in simple harmonic motion.
What is elastic deformation?
Elastic deformation is a temporary change in the shape or size of a material that is fully reversible.1 When you apply a force (stress) to an elastic object, it deforms, but as soon as you release that force, the object “snaps back” to its original dimensions.2
Think of it as the “spring-like” behavior of matter.3
1. How it Works at the Atomic Level
To understand elastic deformation, you have to look at the atoms inside the material.4
- The Bond Stretch: In a solid, atoms are held together by interatomic bonds (like tiny, invisible springs).5 When you pull on the material, you are slightly increasing the distance between these atoms.
- No Permanent Slippage: During elastic deformation, the atoms do not slide past one another or break their original bonds.6 They simply stretch away from their equilibrium positions.7
- The Return: Because the bonds remain intact, they act as a restoring force.8 Once the external pull is gone, the atoms are pulled back to their original “home” positions.
2. The Limits of Elasticity
Every material has a breaking point, or more accurately, a “permanent change” point.9
- The Elastic Limit (Yield Point): This is the maximum amount of stress a material can handle while still being able to return to its original shape.10
- Plastic Deformation: If you exceed the elastic limit, you enter the “plastic” zone.11 At this point, atomic planes actually slide past each other and bonds break/reform.12 The material is now permanently bent or stretched (like a paperclip you’ve pulled too far).13
3. Real-World Examples
| Category | Example |
| Everyday Items | A rubber band stretching, a trampoline mat dipping, or a diving board bending. |
| Engineering | Steel beams in a skyscraper “swaying” in the wind or aircraft wings flexing during flight. |
| Biology | Your skin stretching when you move or the way your tendons snap back after a jump. |
| Microscopic | Sound waves traveling through the air (air molecules undergo tiny elastic decompressions). |
Key Takeaway
Elastic deformation follows Hooke’s Law, meaning the amount of deformation (strain) is directly proportional to the force applied (stress).14 This linear relationship is why we can use materials like steel and rubber to create predictable sensors, scales, and clock springs.
Elastic and Plastic Deformation
This video provides a clear breakdown of the differences between temporary and permanent changes in materials using simple visual analogies.
What is the relationship between stress, strain, and Hooke’s Law?
In physics and engineering, stress, strain, and Hooke’s Law form the foundation of how we understand the strength and flexibility of materials.1
1. Defining the Terms
To understand the relationship, we first need to define the “action” (stress) and the “reaction” (strain):
- Stress (σ): The internal force per unit area.3 It represents the “intensity” of the force the material is feeling. σ = F/A (Measured in Pascals or 5 N/m2)
- Strain (Εvar): The ratio of deformation to the original length.8 It represents “how much” the material stretched or compressed relative to its size. Εvar = ΔL/L0 (Strain is unitless because it is a ratio)
2. The Relationship: Hooke’s Law
Hooke’s Law states that for most materials in their “elastic” state, stress is directly proportional to strain.11 In other words, if you double the force (stress), you double the deformation (strain). This linear relationship is written as:
σ = Evar
Young’s Modulus (E)
The constant of proportionality (12E) is known as Young’s Modulus (or the Modulus of Elasticity).13
- High E: The material is very stiff (like steel).14 It takes a lot of stress to cause even a tiny bit of strain.15
- Low E: The material is very flexible (like rubber). A small stress causes a large strain.16
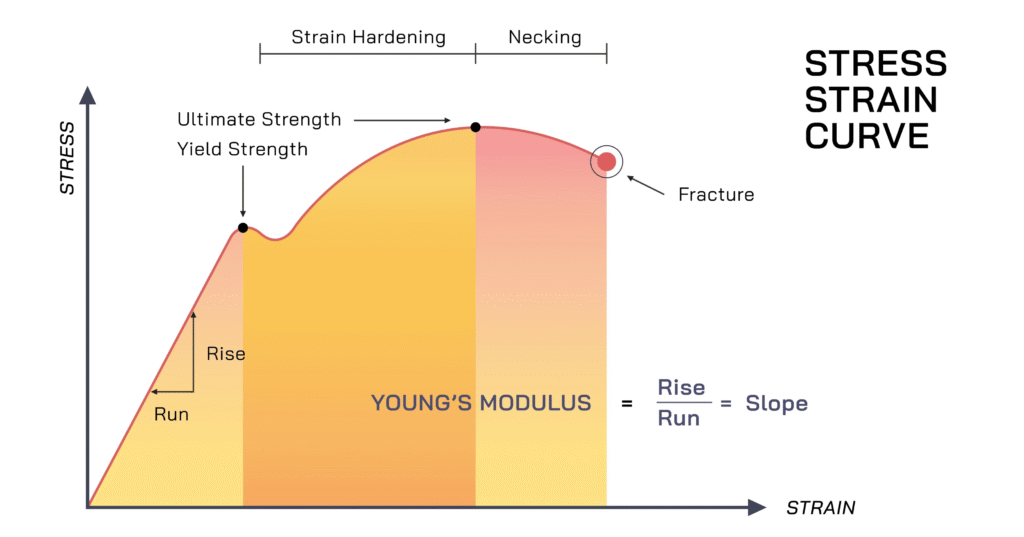
3. The Stress-Strain Curve
The relationship between these three isn’t permanent. If you pull a material too hard, Hooke’s Law eventually “breaks.”17 Engineers use a Stress-Strain Curve to visualize this:
- Proportional Limit: The straight-line portion of the graph where Hooke’s Law (18σ = Evar) is perfectly active.19
- Elastic Limit: The point beyond which the material will no longer return to its original shape.20
- Plastic Region: Beyond the elastic limit, the material deforms permanently.21 Stress and strain are no longer proportional here.
Comparison: Springs vs. Materials
| Feature | Hooke’s Law (Springs) | Hooke’s Law (Materials) |
| Formula | F = kx | σ = Evar |
| Focus | The specific object (the spring). | The substance itself (the steel). |
| Constant | Spring Constant (k): Depends on shape/size.22 | Young’s Modulus (E): Depends only on the material.23 |
Would you like me to show you how to calculate the stress and strain for a specific material, like a steel cable or a nylon rope?
Intro to Young’s Modulus, Stress & Strain
This video provides a basic introduction to how materials respond to external pressure and explains the formulas used to calculate their elasticity.
How does the ideal spring describe simple harmonic motion?
An ideal spring describes Simple Harmonic Motion (SHM) because it provides the perfect mathematical conditions for a repeating, sinusoidal oscillation.1 In physics, an “ideal” spring is one that has no mass and follows Hooke’s Law perfectly without any energy loss (friction).2
The relationship is built on three main pillars: the restoring force, the acceleration, and the conservation of energy.
1. The Restoring Force (Hooke’s Law)3
The defining characteristic of SHM is a force that always pushes or pulls an object back toward a center point (equilibrium).4 For an ideal spring, this is described by Hooke’s Law:5
F = -kx
- k (Spring Constant): Represents the stiffness.6
- x (Displacement):7 How far the mass is from the center.
- The Negative Sign: Crucial because it shows the force is a restoring force—it always acts in the opposite direction of the displacement.8
2. The Equation of Motion
By combining Hooke’s Law with Newton’s Second Law (F = ma), we can see how the spring dictates the object’s movement:
ma = -kx → a = -(k/m)x
This reveals the mathematical “heart” of SHM: acceleration is directly proportional to displacement but in the opposite direction.11 Because acceleration is the second derivative of position, this leads to a sinusoidal solution where the position over time follows a wave:12
x(t) = Acos(ωt + φ)
- Where 13 ω (angular frequency) is defined as 14 sqrt(k/m).15
3. Energy Exchange
An ideal spring describes SHM by perfectly “recycling” energy. In a frictionless system, the total mechanical energy remains constant, constantly swapping between two forms:16
- Elastic Potential Energy (17U = 1/2kx2): Maximum at the farthest points (amplitude), where the spring is fully stretched or compressed.18
- Kinetic Energy (K = 1/2mv2): Maximum at the equilibrium point ($x=0$), where the mass is moving at its highest speed.
Key Properties of the Ideal Spring System
| Property | Description |
| Independence of Amplitude | The time it takes for one cycle (the period) does not change regardless of how far you stretch the spring. |
| The Period (T) | Calculated as T = 2πsqrt(m/k). A heavier mass slows it down; a stiffer spring speeds it up. |
| Equilibrium19 | The point where the spring is at its natural length and the net force on the mass is zero.20 |
Simple Harmonic Motion Derivations using Calculus (Mass-Spring System)
This video is helpful because it uses calculus to step-by-step bridge the gap between the physical force of a spring and the mathematical wave function of the motion.
What is the reference circle and how can it be used to describe simple harmonic motion?
The reference circle is a geometric tool used to visualize Simple Harmonic Motion (SHM) by connecting it to Uniform Circular Motion (UCM).1
While SHM can be difficult to calculate because velocity and acceleration are constantly changing, UCM is much simpler because the object moves at a constant speed in a circle.2 The reference circle allows us to “map” the complex linear motion of an oscillator onto the simple circular motion of a hypothetical particle.3
1. The Core Concept: The Shadow4
The fundamental relationship is this: SHM is the one-dimensional projection of uniform circular motion.5
Imagine a ball moving at a constant speed around a vertical circle. If you shine a light from above, the shadow of that ball on the floor will move back and forth in a straight line.6 That shadow is performing Simple Harmonic Motion.7
- The Reference Circle: The circle that the “imaginary” particle travels around.
- The Radius (8 A): The radius of the circle is exactly equal to the amplitude of the SHM.9
- The Reference Particle (10 P): The imaginary point moving around the circle at a constant angular velocity (11 ω).12
- The Projection (13 Q): The real-world point (like a mass on a spring) that tracks the position of the shadow on the diameter.14
2. Describing the Motion Mathematically
The reference circle allows us to use simple trigonometry to find the exact position, velocity, and acceleration of an oscillator at any moment (15 t).16
Position ($x$)
As the reference particle $P$ moves, the angle it makes with the center is θ = ωt + ω. By looking at the triangle formed in the circle, the horizontal position of the shadow is:
x(t) = Acos(ωt + φ)
Velocity (v)
In circular motion, the velocity vector is always tangent to the circle. The velocity of the SHM shadow is just the horizontal component of that tangent vector:
v(t) = -Aωsin(ωt + φ)
Acceleration (a)
The acceleration in circular motion points toward the center (centripetal). Its horizontal component gives us the acceleration of the SHM:
a(t) = -Aω2cos(ωt + φ)
3. Why use the Reference Circle?
- Phase Visualization: It makes “Phase” (17 φ) easy to understand.18 The phase is simply the starting angle of the particle on the circle at t=0.
- Constant Speed vs. Changing Speed: It explains why an oscillator moves fastest at the center (where the shadow “keeps up” with the ball’s full speed) and stops at the edges (where the ball is moving mostly vertically relative to the shadow).
- Predicting Future States: If you know where a mass is on its cycle, you can place a “ghost” particle on the circle and easily calculate exactly where it will be 2 seconds later by just rotating the particle by an angle of ωΔt.
Summary Table
| Feature | Uniform Circular Motion | Simple Harmonic Motion |
| Path | Two-dimensional circle. | One-dimensional straight line. |
| Speed | Constant (v = ωA). | Constantly changing (max at center). |
| Radius/Amplitude | A is the radius of the path. | A is the max displacement. |
| Time Period | Time for one full lap (2π/ω). | Time for one full back-and-forth. |
Would you like to try a practice problem where we find the position of a spring after a certain amount of time using the reference circle method?
SHM components and equations from the reference circle
This video is helpful because it visually demonstrates how the components of velocity and acceleration are derived by projecting the vectors of a rotating particle onto a single axis.
How does simple harmonic motion relate to energy?
In an ideal system, Simple Harmonic Motion (SHM) is a masterpiece of energy conservation. The system continuously “trades” energy back and forth between two different forms, but the total amount of energy never changes.
1. The Energy Swap
In SHM, energy is always shifting between Kinetic Energy (K) and Potential Energy (U).
- Potential Energy (Energy of Position): In a spring system, this is elastic potential energy (U=1/2kx2). In a pendulum, it is gravitational potential energy (U=mgh). It is at its maximum when the object is at its farthest points (amplitude).
- Kinetic Energy (Energy of Motion): This is the energy the object has because it is moving (K=1/2mv2). It is at its maximum when the object rushes through the center (equilibrium) at its highest speed.
2. The Conservation Law
In a frictionless (undamped) system, the Total Mechanical Energy (E) is constant at every single point in the cycle:
E=K+U=constant
At any moment, you can calculate the total energy using the maximum displacement (Amplitude, A):
Etotal=1/2kA2
Because A and k are constant, the total energy doesn’t depend on where the object is or how fast it’s going at a specific second; it only depends on how much energy you “put in” to start the oscillation.
3. Energy vs. Position (The “U” and “n” Curves)
If you graph energy against the object’s position (x), you get two intersecting parabolas:
- Potential Energy looks like a cup (U-shape), peaking at the edges (x=A,−A).
- Kinetic Energy looks like an arch (n-shape), peaking at the center (x=0).
- Total Energy is a flat, horizontal line sitting on top of both.
Key Takeaways
| Position | Potential Energy (U) | Kinetic Energy (K) | Velocity (v) |
| At Amplitude (x=A) | Maximum | Zero | Zero |
| At Equilibrium (x=0) | Zero | Maximum | Maximum |
| In Between | Increasing/Decreasing | Decreasing/Increasing | Intermediate |
Export to Sheets
Note on “Real” Systems: In the real world, “damping” (friction or air resistance) slowly turns this mechanical energy into heat, causing the amplitude to shrink until the motion stops.
Would you like me to show you how to find the velocity of a mass at a specific position using these energy equations?
Energy graphs for simple harmonic motion This video provides a clear visual demonstration of how kinetic and potential energy curves mirror each other to maintain a constant total energy throughout an oscillation.
Simple Harmonic Motion(SHM) – Graphs of Mechanical Energies – YouTube
What is a pendulum?
A pendulum is a physical system consisting of a weight (called a bob) suspended from a pivot point by a string, rod, or wire, allowing it to swing freely back and forth.1
In physics, pendulums are studied as classic examples of oscillators.2 When you pull the bob to one side and release it, gravity pulls it back toward its center (equilibrium) position.3 Because the bob has mass and momentum, it overshoots the center and swings up the other side, creating a repeating cycle.
1. Components of a Pendulum
- The Bob: The mass at the end of the string.4 In an “ideal” simple pendulum, we treat this as a single point where all the mass is concentrated.5
- The Pivot: The fixed point from which the string hangs.6
- The Arm (7 L): The length of the string or rod.8
- Restoring Force: The component of gravity (9 mgsinθ) that acts to pull the bob back to the center.10
2. Is it Simple Harmonic Motion?
A pendulum is a unique case because it is not always performing Simple Harmonic Motion. Its behavior depends on how far you swing it:
- Small Angle Approximation: If the angle of the swing is small (usually less than 15°), the restoring force is nearly proportional to the displacement.11 In this narrow window, the pendulum performs Simple Harmonic Motion.
- Large Angles: If you swing the pendulum wide, the relationship between force and displacement becomes “non-linear.”12 The motion is still periodic (it repeats), but it is no longer strictly SHM, and the math becomes much more complex.
3. The Period of a Pendulum
One of the most famous discoveries in physics (attributed to Galileo) is that the time it takes for a pendulum to complete one full swing—the period (13 T)—does not depend on the mass of the bob or how wide the swing is (at small angles).14 It only depends on two things:
- Length (L): A longer pendulum swings more slowly.15
- Gravity (g): A pendulum would swing faster on Jupiter than on Earth.
The formula for the period is:
T = 2πsqrt(L/g)
4. Common Types & Applications
| Type | Description | Application |
| Simple Pendulum | A point mass on a massless string. | Idealized physics problems. |
| Compound Pendulum | A solid, rigid object (like a baseball bat) swinging. | Clock pendulums, metronomes. |
| Foucault Pendulum | A massive pendulum that can swing in any direction. | Proving the Earth’s rotation. |
| Ballistic Pendulum | Used to stop a projectile (like a bullet). | Measuring the speed of bullets. |
Would you like to see how the “Small Angle Approximation” works mathematically to turn a pendulum into an SHM system?
Introduction to Simple Harmonic Motion for Pendulums
This video provides a walkthrough of the concepts behind pendulum motion and demonstrates how they are treated as harmonic oscillators in physics.
What is damped harmonic motion?
Damped harmonic motion is any oscillatory motion where the amplitude of the vibration decreases over time due to the presence of resistive forces (like friction or air resistance).1
While simple harmonic motion (SHM) is an “ideal” model that oscillates forever, damped motion is what actually happens in the real world.2 Every time an object moves, it loses a bit of its mechanical energy to its surroundings (usually as heat), causing the motion to eventually stop.3
1. The Forces at Play
In damped motion, the object feels two primary forces:
- Restoring Force (4 F = -kx): The elastic force trying to pull the object back to the center.5
- Damping Force (6 F_d = -bv):7 A resistive force that is proportional to the velocity of the object.8 The constant b represents how “thick” or “sticky” the damping medium is.
2. Three Types of Damping
The behavior of the system depends entirely on the strength of the damping force (b) relative to the spring’s stiffness (k) and the mass (m).
| Type | Condition | Behavior | Real-World Example |
| Underdamped | Weak Damping | The system oscillates many times, but each swing is smaller than the last until it stops. | A plucked guitar string or a swinging playground swing. |
| Critically Damped | Optimal Damping | The system returns to the center as fast as possible without overshooting or oscillating. | Modern car shock absorbers or self-closing doors. |
| Overdamped | Strong Damping | The system is so sluggish that it slowly “drifts” back to the center without ever oscillating. | A door closer in a thick, heavy oil or a needle on a high-end weighing scale. |
3. The Mathematics of Decay
For an underdamped system, the position x at any time t can be described by a cosine wave “wrapped” in a decaying exponential function:11
x(t) = Aeγtcos(ωt + φ)
- γ: This is the “envelope” of the motion.12 It shows that the amplitude is shrinking exponentially over time.13
- ω: The frequency of a damped system is actually slightly slower than the frequency of an undamped system because the friction “drags” on the motion.14
Summary: SHM vs. Damped Motion
- SHM: Total energy is constant; amplitude is constant; motion is eternal.
- Damped Motion: Total energy decreases; amplitude decays; motion eventually ceases.15
Damped Oscillations – Underdamped, Overdamped, and Critically Damped
This video provides a great visual comparison of the three types of damping using experimental setups, making the difference between “overdamped” and “critically damped” very clear.
What is driven harmonic motion and what is resonance?
Driven harmonic motion occurs when an external, periodic force is applied to an oscillating system.1 While a simple oscillator eventually stops due to friction, a “driven” system is kept alive by a “driver” that continually pumps energy back into it.
Resonance is the specific state where the frequency of that external driver matches the natural frequency of the system, resulting in the maximum possible amplitude.2
1. The Driven Oscillator
In a driven system, the motion is determined by the tug-of-war between the internal restoring force and the external driving force.
- The Driving Force (Fext): Usually follows a sinusoidal pattern, like 3 F0cos(ωt).4
- The Result: After a brief “chaotic” start (called transient behavior), the system eventually settles down and oscillates at the driving frequency, not its own natural frequency.5
2. Resonance: The Sweet Spot
Resonance occurs when the driving frequency (6 ω) is equal to (or very close to) the system’s natural frequency (7 ω0).8
At this point, the external force is perfectly timed with the system’s natural “swing.”9 Because each push happens when the object is already moving in that direction, the energy transfer is incredibly efficient, and the amplitude grows rapidly.
| Driving Frequency (ω) | System Response |
| Much lower than ω0 | The object just follows the driver slowly; amplitude is small. |
| Equal to ω0 (Resonance) | Maximum energy transfer. Amplitude peaks dramatically. |
| Much higher than ω0 | The driver moves too fast for the mass to keep up; amplitude drops toward zero. |
3. Real-World Examples
- The Playground Swing: You are the “driver.” If you push a child exactly at the natural frequency of the swing, they go higher with very little effort.10 If you push at the wrong time, you actually get in the way of the motion.
- Radio Tuning: When you turn the dial, you are changing the natural resonant frequency of the electrical circuit inside the radio.11 When it matches the frequency of a broadcast station, that signal “resonates” and becomes strong enough to hear.12
- Breaking a Wine Glass: A singer can break a glass by hitting a note that exactly matches the glass’s natural frequency.13 The resonance causes the glass fibers to vibrate so violently that they shatter.14
- The Tacoma Narrows Bridge: Wind acted as a periodic driver that matched the bridge’s natural frequency. The resulting resonance caused the massive structure to twist and eventually collapse.
4. The Role of Damping
Damping (friction) acts as a “ceiling” for resonance.15
- Low Damping: The resonance peak is very high and narrow. A tiny shift in frequency and you lose the resonance.
- High Damping: The resonance peak is lower and broader. The system won’t reach a massive amplitude, but it will respond to a wider range of frequencies.
Understanding Vibration and Resonance
This video is excellent for visualizing how small periodic forces can build up into massive oscillations when they hit a system’s “sweet spot.”